Portfolio
Coupled Rigid-Block Analysis (CRA)
Stability-aware design of complex discrete-element assemblies
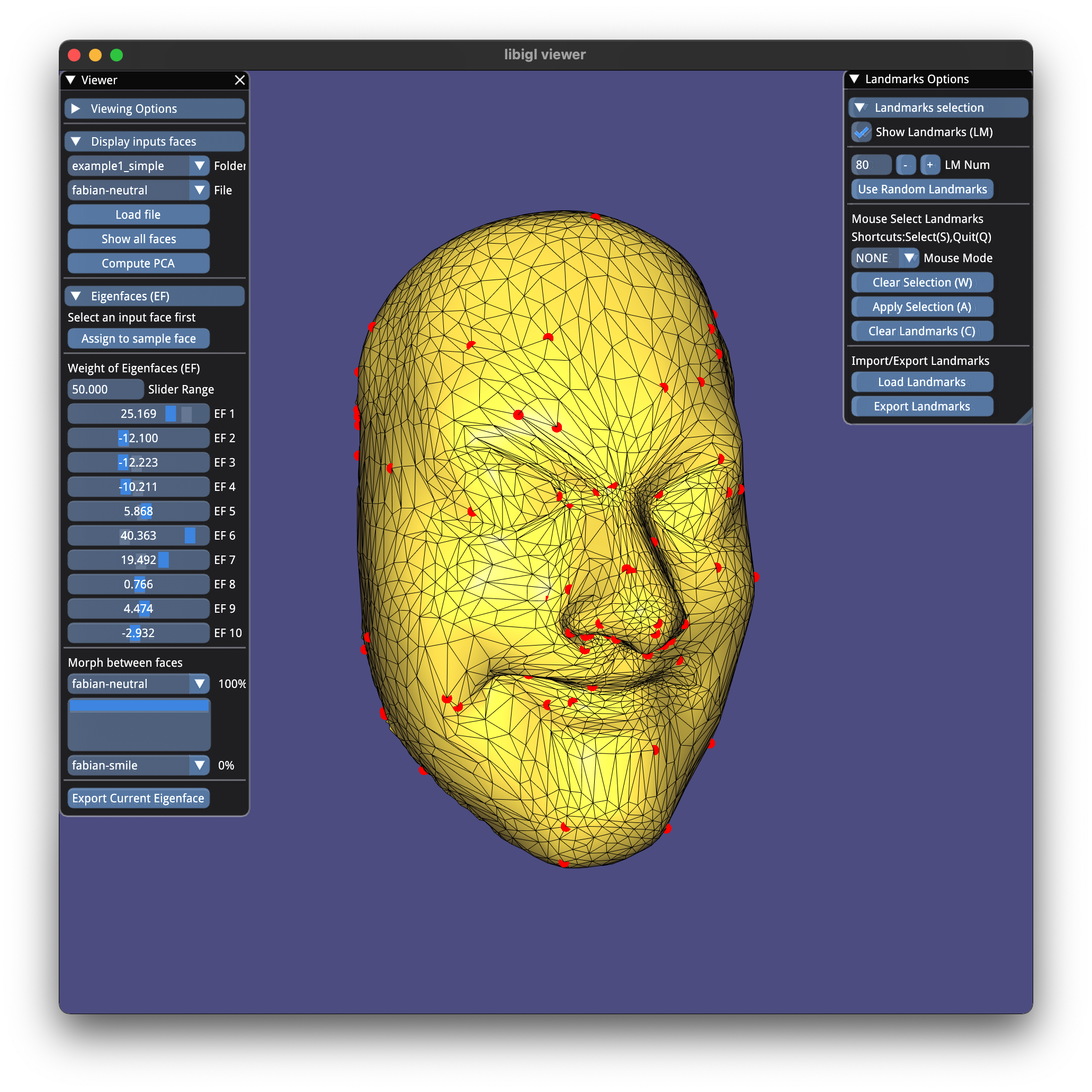
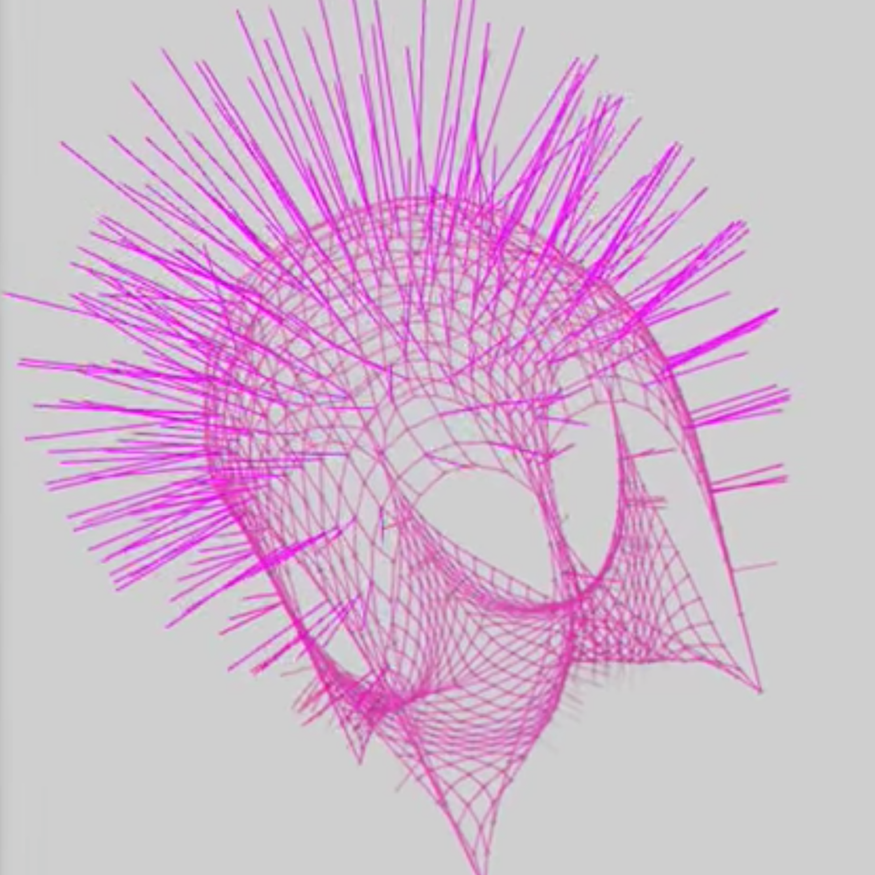
PCA Faces
3D face morphing using PCA on high-dimensional point cloud data

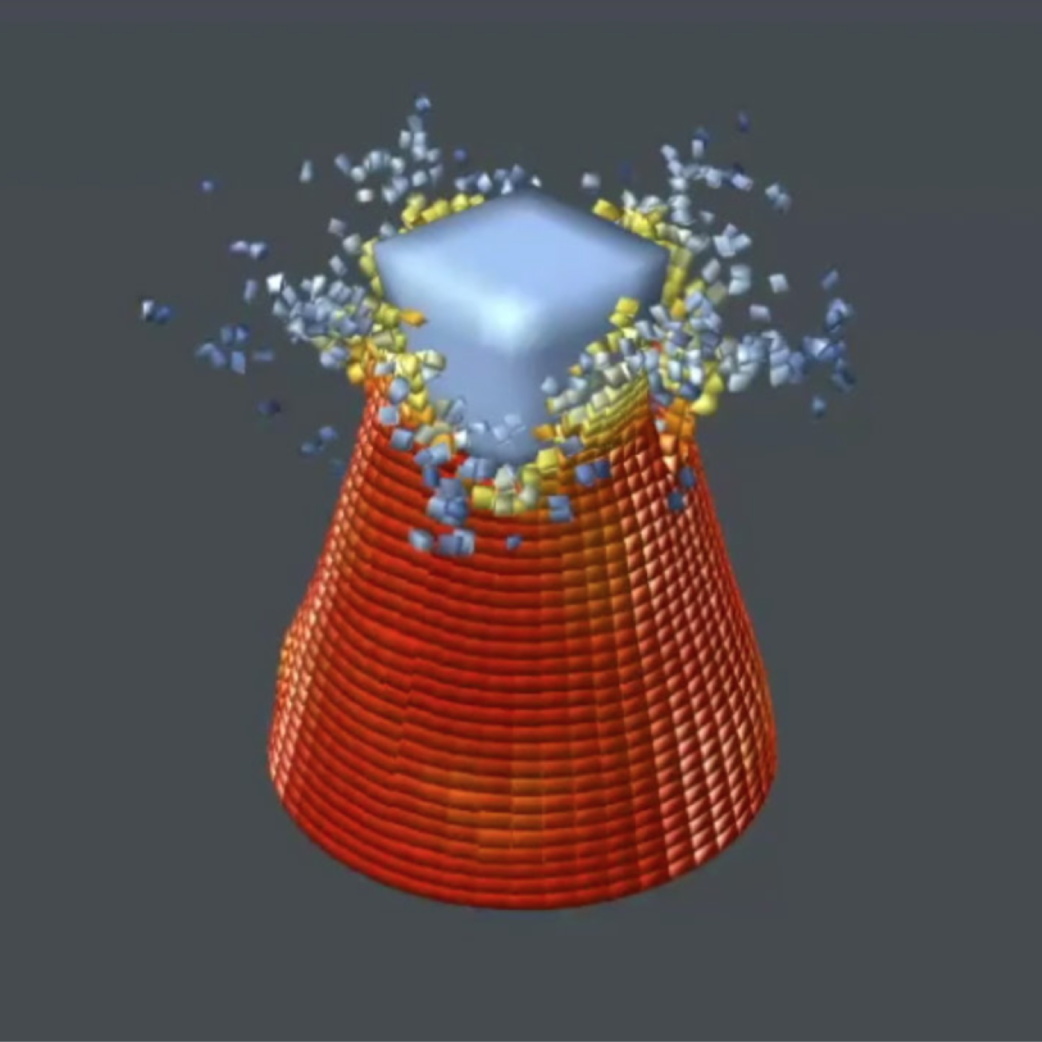
Robotic Force Printing
MIT Design-Build Workshop exploring robotic additive manufacture of shell structures

Strabag Clash Management System
Multi-project BIM issue management system with commenting and model review
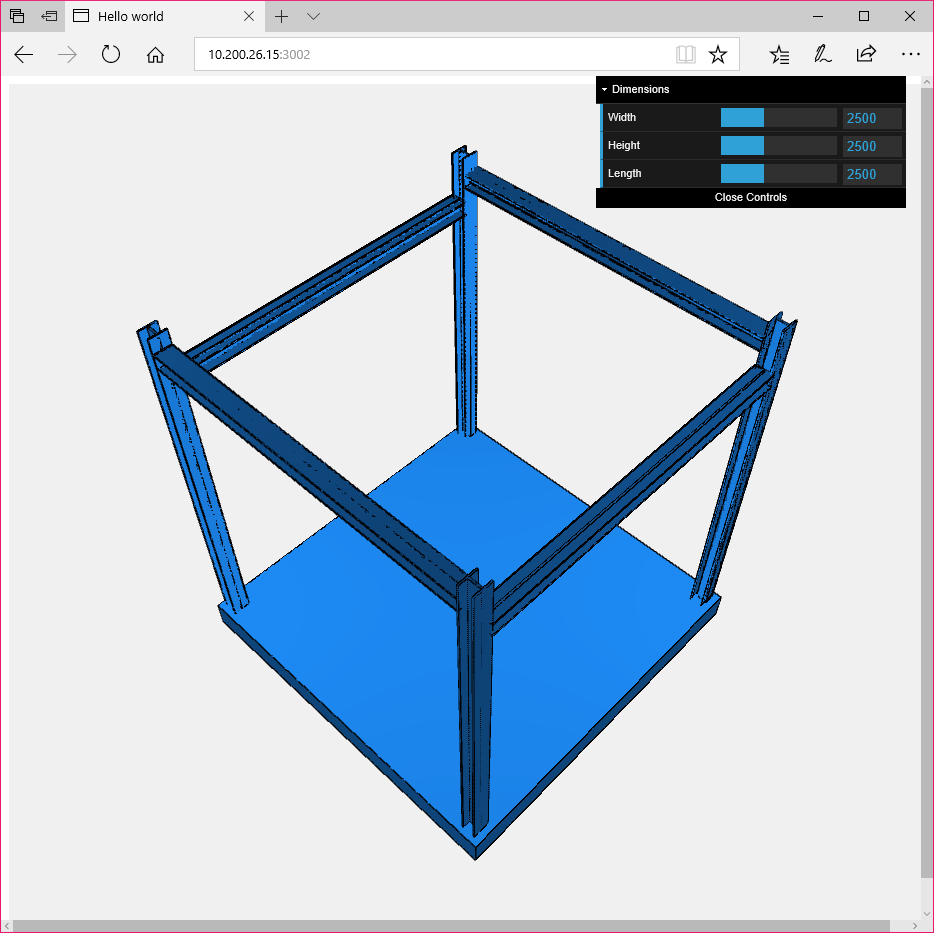
Script-based Product Description
Using modern programming languages as a file format for 3D product information
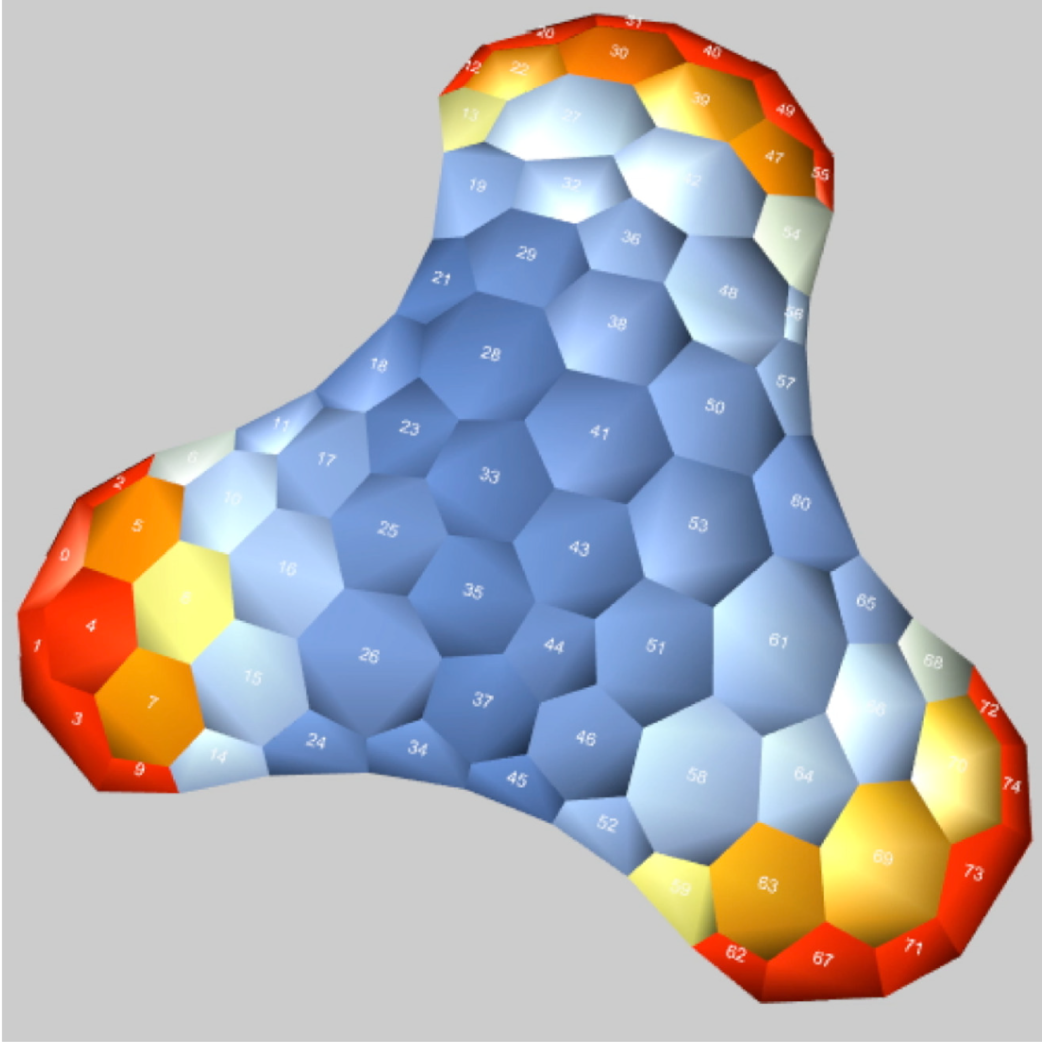
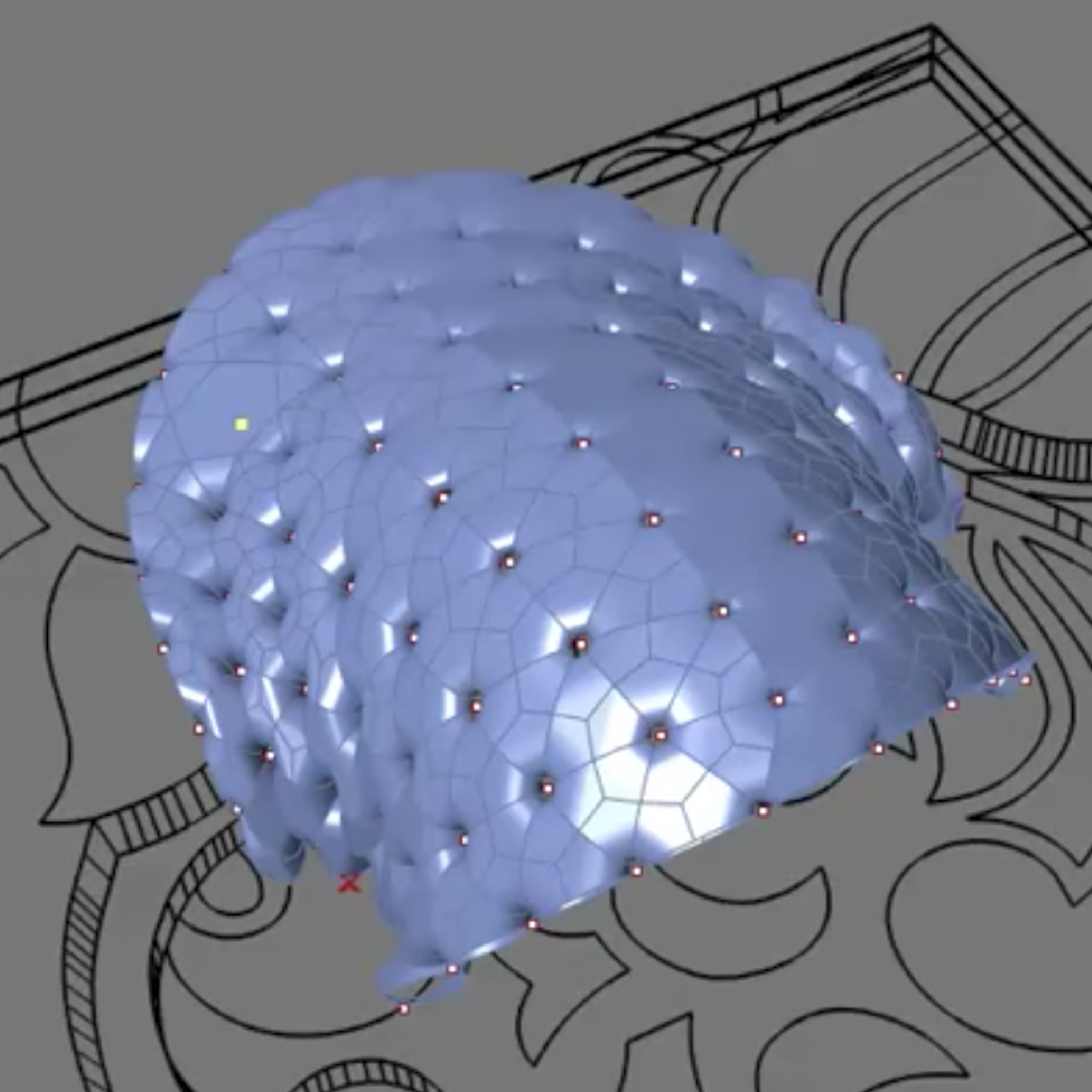
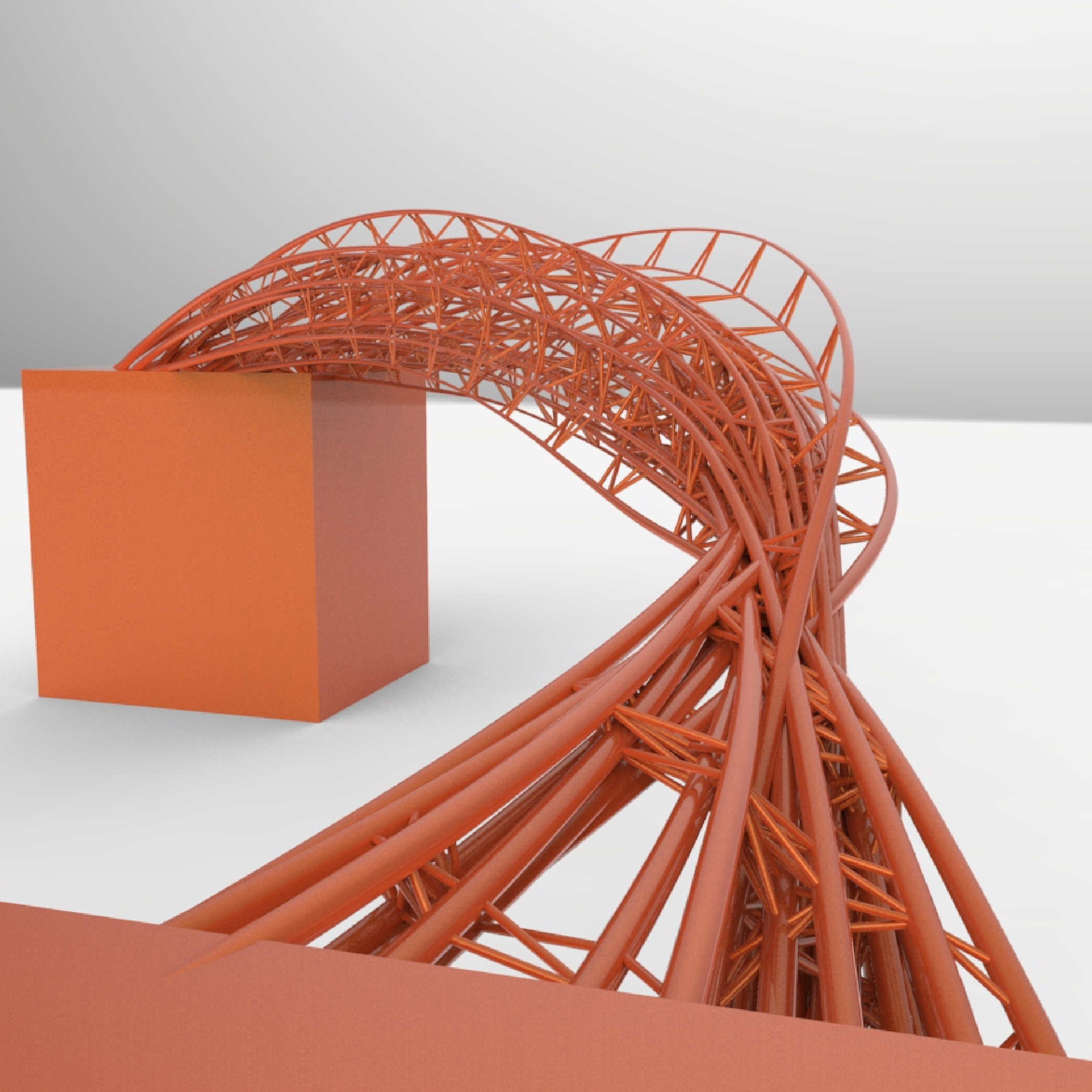
Assembly-Aware Shell Structures
Computational workflow for assembly-aware design of masonry shell structures
Leopard
Open source mesh processing plugin for Grasshopper with subdivision schemes
PhysX.GH
Rigid body simulation tool for Grasshopper using NVIDIA PhysX
ICD/ITKE Research Pavilion 2015/16
Computational design tools for a bending-active research pavilion at University of Stuttgart
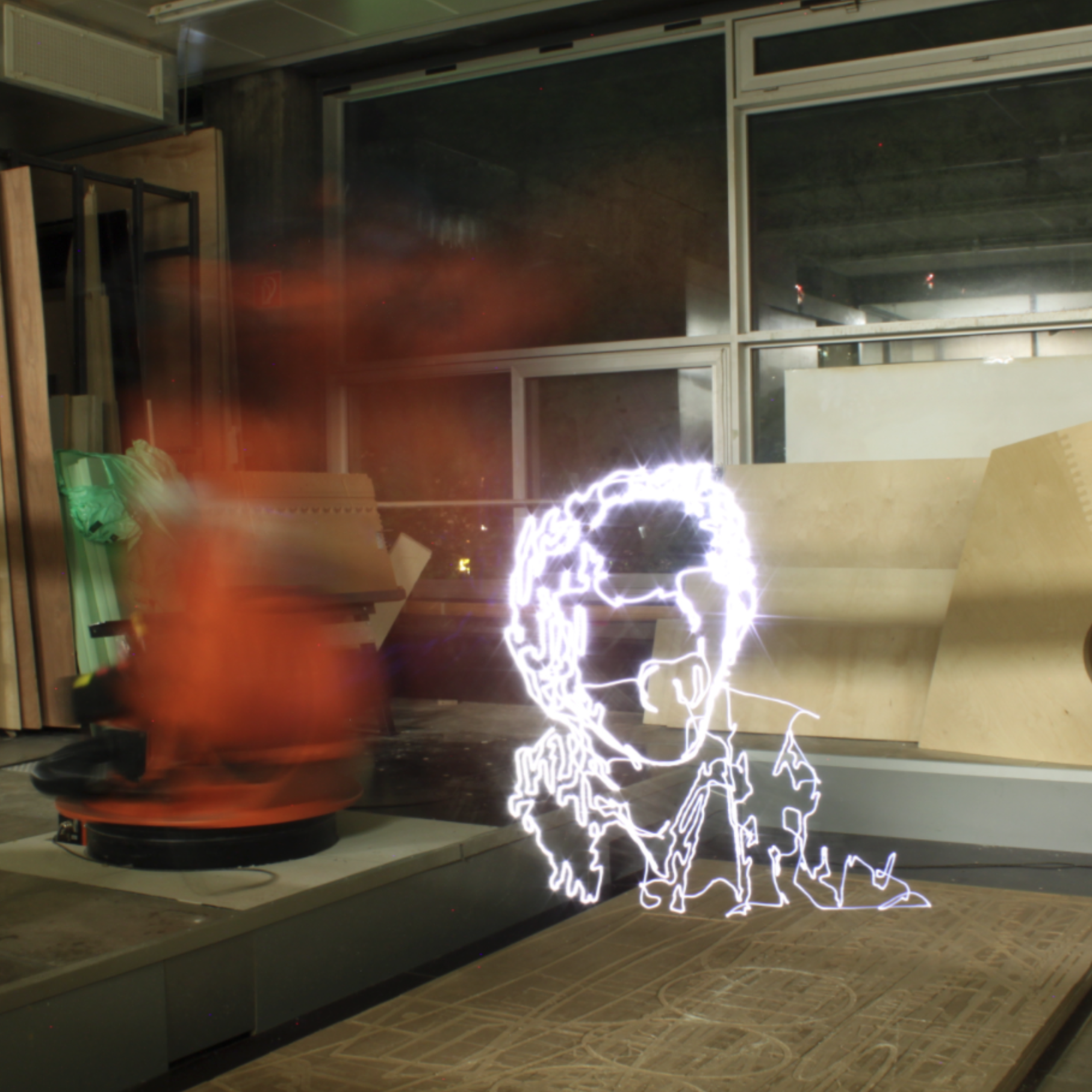
Robotic Light Sculpture
Light sculpture created by an industrial robot using Kinect V2 point cloud scanning
Fish
3D swarm simulation with GUI written in Processing
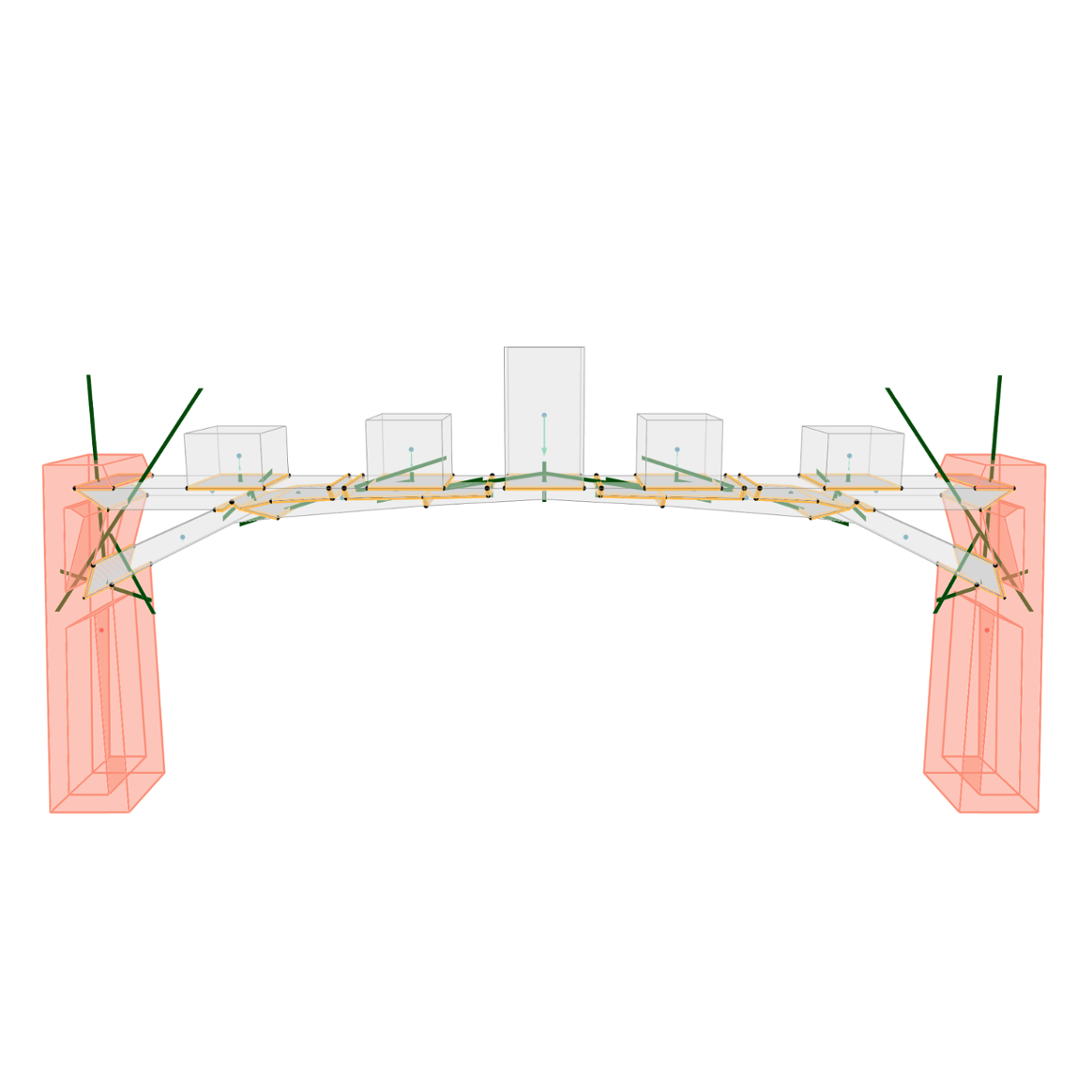
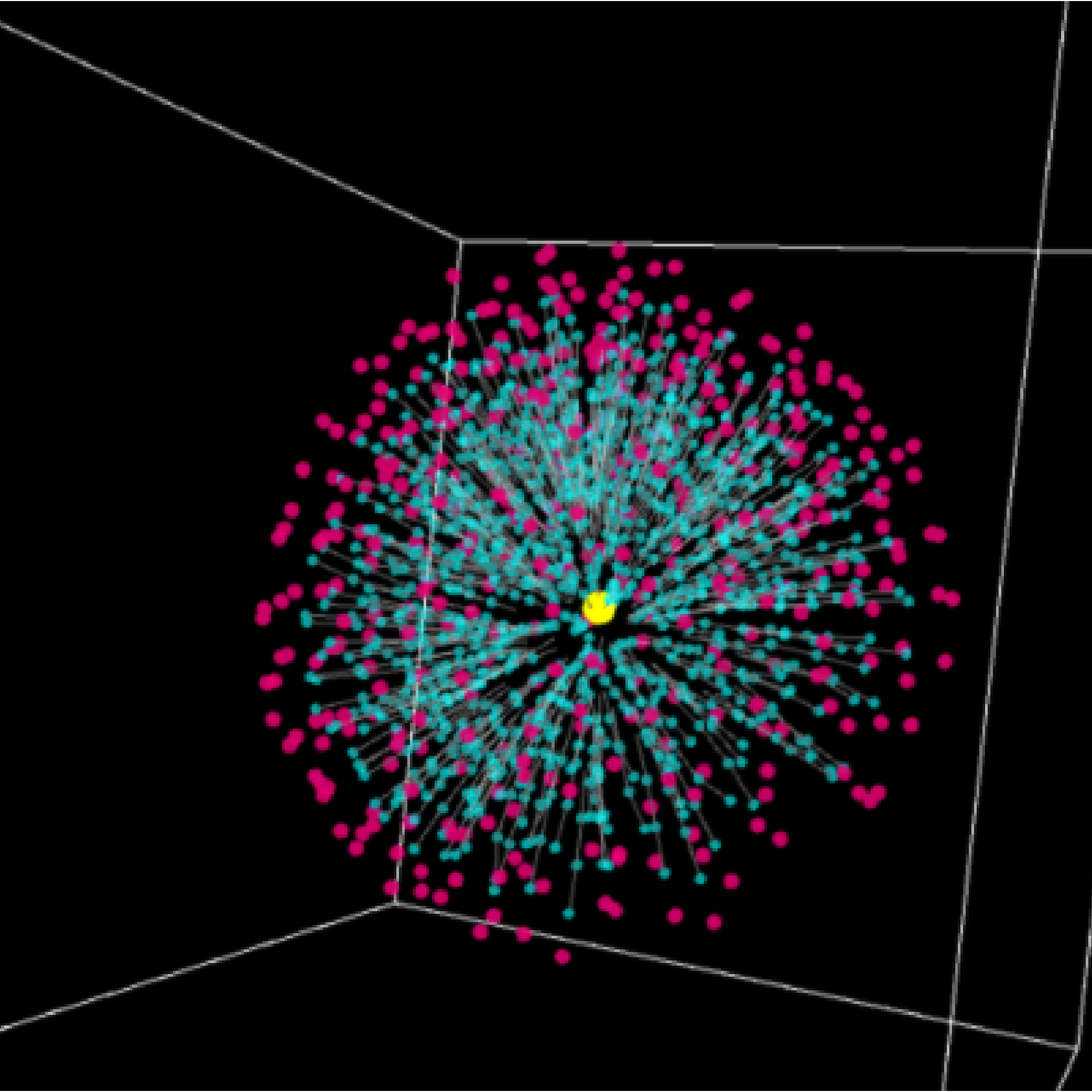
Rhino.Python Swarm Bridge
Swarm behaviour simulation in Rhino.Python generating bridge geometry
Digital Lamp GUI
Undergraduate architectural thesis GUI for a generative church prototype, written in Processing/Java

Butterfly Effect Pavilion
Parametric pavilion design for Ilan Green Expo 2014
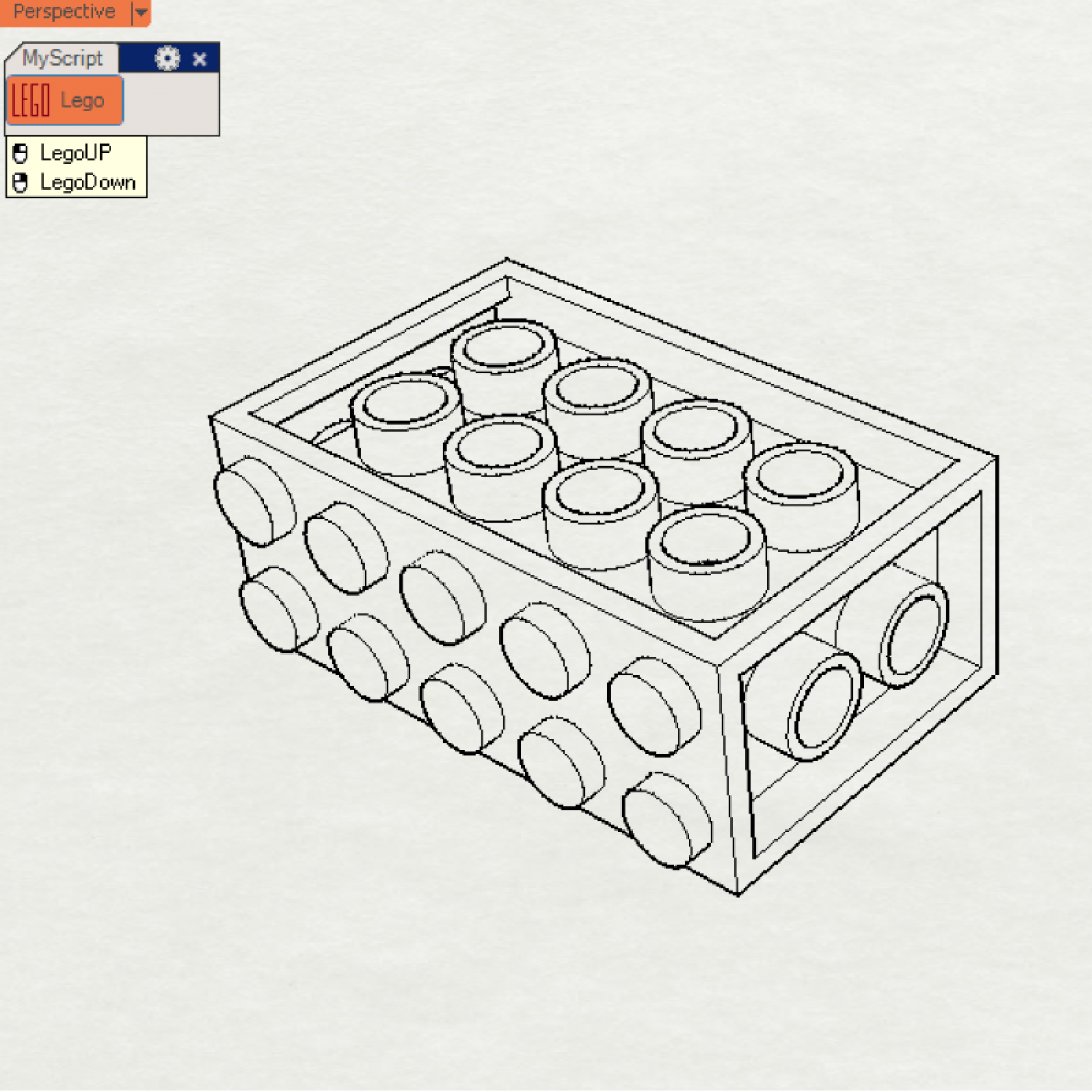
LEGO Tool for Rhino
Python script for Rhino to design and 3D print customised LEGO components